Typus L LASER Strapdown Inertiae navigationis




Depictio producti
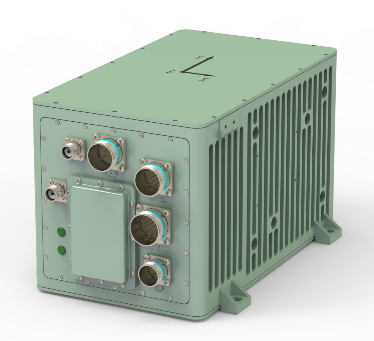
Exemplar 50 Inertiae navigationis ratio est solutio navigationis status-of-artis.Componit Typum 50 Ringum Laser Gyroscope et Vicus Flexibile Accelerometer.Haec ratio cum GNSS, altimetris, metris et aeris velocitatibus integrari potest ut accuratas navigationes notitias praebeat sicut celeritas, situs, habitus pro aere et terra portantium.Apta est ad varias applicationes inter lacus, vehicula armata, aircraft, fuci, naves et plura.Systema accuratam accurationem consequitur cum positione accurationis minus quam 5 metrorum cum GNSS integratis.Noctis tempus habet sub 10 minuta et continue per 10 horas operatur.Systema lineamenta multiplicia interfaciunt et condiciones environmental provocantes sustinere possunt.Foedus et leve, certa et versatile solutione navigationis eget.
PRODUCT PARS
l Pretium efficax anulus laser gyro et vicus accelerometer
l Libitum static vel movere basi auto-alignment
l Error parametri calibratiis et compensatio in plena temperatus range
l Libitum interfaces diversae initus pro GNSS/Odometer/DVL
l modos navigationis configurable
l optimum environmental convenientia
l signa militaria
APPLICATION Areas
l Mare navigation vehiculum
l Sub aqua vehiculum navigationis et positioning
l Positioning et a septentrione in terra vehiculum invenire
l Stabilization et imperium ad movens carrier
l Habitus mensurae postulandi applicationes
MAIN functiones
l Munus habet notitiarum outputationis ut tabellarius positio, caput, habitus angulus, rate angularis et celeritas in tempore reali;
l Modos laborat ut navigationem insitam puram et INS/GNSS (including Beidou) integratam navigationem;
l Possident munus recipiendi satellitem navigationis instructum ab externa temporis systema frequentia vexillum apparatum;
l Habet terram sui noctis et functionem noctis sustinet aeris;
l Habet functiones sicut potestatem experimenti sui, periodici sui ipsius probationis, status relationis, institutionis erroris excambium, ac non-volatile tabularium.
PERFORMANCE INDICATORS
| Ratio accurationis Ratio Accuracy | Pura Inertiae Navigation / pura Inertial Navigation | 0.8 nmile/1h, CEP | |
| Integrated Navigation / Navigation cum GNSS | ≤5m , 1σ _ | ||
| Petere angulus / Heading | 0.05°, RMS | ||
| Habitus horizontalis (volumen et picem) Habitus horizontalis (tortamque & picem) | 0.01°, RMS | ||
| Pura Inertia Velocitas | 1 .5 m/s , RMS | ||
| GNSS Integrated navigation Velocity | 0. 1 m/s , RMS | ||
| Indicatores insita cogitationes Gyro et Accelerometer Parameters | Laser gyroscope _ Gyroscope | Range/Range | ± 6 00 deg/s |
| Bias Stability | ≤0.01 deg/h, 1σ | ||
| Nulla bias repeatability Bias Repeatability | ≤0.01 deg/h, 1σ | ||
| Scale Factor non-linearitatis | 10 ppm | ||
| Accelerometer Accelerometer | Range/Range | ± 15g _ | |
| Bias Stability | ≤10μg, 1σ | ||
| Nulla bias repeatability Bias Repeatability | ≤10μg, 1σ | ||
| Scale Factor non-linearitatis | 15 ppm | ||
| color tempore Gratia diei et noctis | Frigus Committitur | ≤ 8 min | |
| Re- Start | ≤ 5min _ | ||
| Air/in-Fuga Committitur | ≤10min | ||
| Horas opus Operatio Tempus | Continua opus temporis / Operationis Tempus | plus quam 10h * | |
| Interface Features interface | Supple voltage/Voltage | 18~36VDC | |
| Potentia consummatio | ≤ 40W @ 24VDC | ||
| Electrical interface / Electrical | RS232 2 RS422 3 CAN 2 Aer 1 1pps 1 | ||
| Data Update Rate (configurable) | 200Hz@115.2kbps _ _ _ | ||
| Usus environment Environmental | Operating Temperature | -40°C~+65°C | |
| Repono temperatus / at Temperature | -55°C~+85°C | ||
| Usus Altitude / Altitude | 20000m | ||
| Umor | 95% (+25°C) | ||
| Vibratio/Vibratio | 5g @20~2000Hz | ||
| Inpulsa / Concursores | 40 g, 11 ms, 1/2 Sine | ||
| Corporalis proprietatibus Corporalis | Dimensiones / Size (L*W*H) | 240 x202x 169 mm _ | |
| Pondus / pondus | 9 kg | ||
Nota: Structura nativus secundum requisita usoris potest esse.